
ERM vs LRA Vibration Motor: Complete Comparison for Engineers (2026)
Criteria-first ERM vs LRA comparison: response, drivers, power, integration, EMI, and validation tips for OEM engineers.
Choosing between an ERM and an LRA is rarely about “which is better.” It’s about which tradeoffs you can live with in your mechanical stack, your power budget, and your production variance.
This guide is written for electronics OEM product teams (EE/ME/QA/sourcing) building wearables, medical devices, and compact consumer products. It’s a design-in article, not a teardown or a buyer brochure.
Key takeaways
Pick LRA when you need crisp, repeatable haptics and can budget a driver IC plus tuning time. If you ship a premium UX, this is usually the default.
Pick ERM when cost, supply flexibility, and circuit simplicity matter more than effect fidelity. It still solves a lot of “notification buzz” requirements.
Plan the mechanical experiment early. Mounting and enclosure coupling can swing perceived performance more than the datasheet.
ERM vs LRA: ERM LRA comparison matrix for vibration motor selection

Before you compare specs, it helps to align on the physics.
Technical principle: how ERM and LRA generate vibration
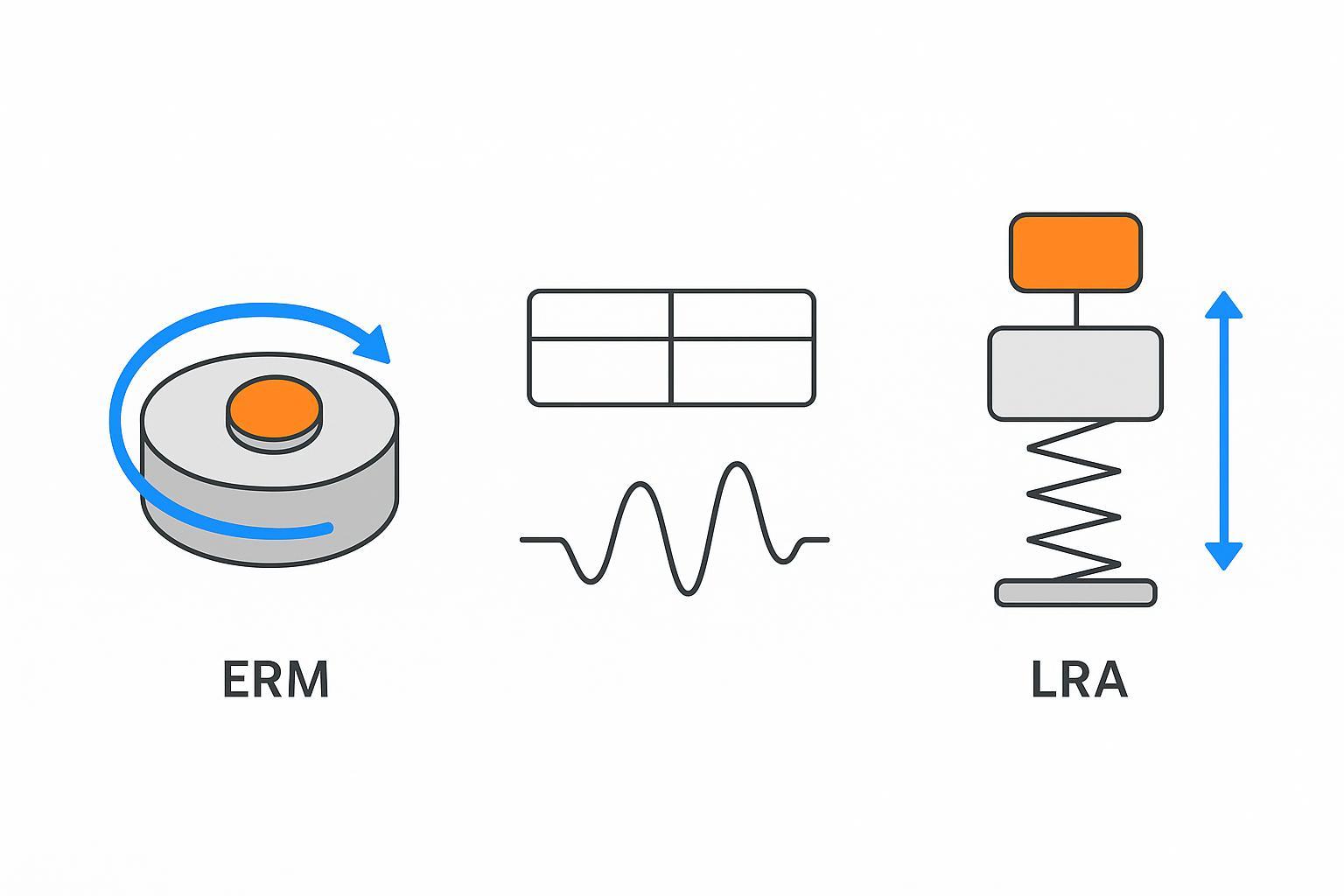
ERM vibration motor (eccentric rotating mass) creates vibration by spinning an off-center weight. The rotating imbalance produces a centrifugal force that grows with speed. Because you’re accelerating a rotating mass, you naturally get spin-up and spin-down ramps.
LRA (linear resonant actuator) moves a small mass back and forth on a spring. When you drive it near its resonant frequency, you get high acceleration with relatively low input power. The tradeoff is that resonance shifts with mounting stiffness, temperature, and unit-to-unit variation—so closed-loop or calibrated drive is often worth it.
Parameter | ERM (eccentric rotating mass) | LRA (linear resonant actuator) |
|---|---|---|
Response time | Noticeable spin-up/spin-down ramps | Faster onset; easier “tap” and “click” effects |
Drive waveform | DC drive; PWM is common for amplitude | AC drive near resonance; waveform shaping matters |
Driver requirement | Can be driven directly (often) | Driver IC recommended for tracking + braking |
Frequency behavior | Frequency and amplitude move together with speed | Frequency is tied to resonance; amplitude is the main knob |
Typical operating frequency | Broad, speed-dependent (often lower) | Narrow band around resonance (commonly higher) |
Power behavior | Can waste energy during ramps and in weak coupling | Efficient when driven at resonance and well-coupled |
Mechanical sensitivity | More electrically forgiving; still affected by coupling | More sensitive to mounting stiffness and resonance shifts |
Noise risk | Buzz/rattle from enclosure coupling is common | Can be quieter, but still sensitive to resonance + mounting |
Size and form factor | Many options (coin/cylindrical); easy to source | Often coin/rectangular packages; fewer drop-in equivalents |
Cost | Lower BOM and simpler electronics | Higher BOM (actuator + driver + tuning effort) |
Key takeaway: If you want this post to function as a vibration motor selection guide for a real product program, treat the actuator, driver, and enclosure as one coupled system.
1) Response time and perceived “crispness”
An ERM is a rotating machine. It has inertia. That shows up as ramping before you get full amplitude and a tail as it spins down.
A linear resonant actuator is closer to a tuned mechanical oscillator. In practice, it can feel more immediate for short effects, but it also comes with resonance constraints.
In most products, an ERM motor’s inertia shows up as a ramp (spin-up) and a tail (spin-down). An LRA can feel more immediate for short effects, especially when you use active braking and keep it close to resonance.
INEED’s own explainer covers these practical differences—plus why braking helps LRA stopping behavior—in its ERM coin vibration vs LRA comparison.
For a deeper external technical reference on LRA resonance behavior (including why tracking/back-EMF sensing matters), Precision Microdrives explains it clearly in AB-020: Understanding Linear Resonant Actuators.
What this means in a product:
Short UI events (tap, tick, confirmation) typically favor LRA.
Long alerts (buzz for a notification) can be fine with ERM if the ramp doesn’t matter.
2) Drive and control complexity
This is the cleanest engineering tradeoff in ERM vs LRA haptics.
ERM is often driven with DC voltage (and PWM for amplitude). It’s straightforward to bring up in EVT and is tolerant of a “good enough” drive.
LRA needs an AC drive near resonance. Resonance is not perfectly constant. It can shift with mounting compliance, temperature, and unit-to-unit variation.
That’s why driver features like resonance tracking and braking matter. You don’t have to pick a specific IC at the concept stage, but you should plan for either:
a driver with automatic resonance tracking, or
a calibration workflow in production plus a consistent mechanical stack.
3) Frequency behavior and effect design
A common confusion is “LRA has more bandwidth” versus “ERM has more bandwidth.” The practical answer is: they give you different knobs.
With ERM, changing drive changes speed, which changes vibration frequency and amplitude together.
With LRA, your strongest output is near its resonant frequency; most effect design is done by shaping amplitude and timing around that constraint.
If you want the clearest short explanation of the resonance problem (and why back-EMF sensing helps), Precision Microdrives lays it out well in AB-020: Understanding Linear Resonant Actuators.
If you’re searching with the phrase “ERM vibration motor vs linear resonant actuator” you’re usually trying to answer one of two questions: “Can I get a crisp tap?” and “How much driver work am I signing up for?” The sections above are the fastest way to answer both.
4) Power and battery behavior
As a rule of thumb, LRAs are most efficient at resonance, and they’re commonly positioned as more efficient than ERM in engineering references such as the Power Electronic Tips comparison linked earlier.
In practice, your power outcome is driven by:
Target perceived strength at the touch point (not just motor acceleration in free air)
Duty cycle and event rate
Mechanical coupling (lost energy becomes heat and audible noise)
If you’re near a battery limit, do the mechanical work early. You can’t firmware your way out of a weak mechanical stack.
5) Mechanical integration and enclosure coupling
This is where many projects go sideways.
You can pick the “right” actuator category and still ship haptics that feel cheap because you excited the wrong enclosure mode or introduced a rattle path.
Mounting affects tactile sharpness, audible buzz, and long-term durability. If the haptics motor is safety- or compliance-adjacent in your product, qualify the mounting method with drop, vibration, thermal cycling, and humidity exposure—not just a quick bench feel test.
Practical rules that usually survive first builds:
Start with a rigid mounting surface. Flex eats energy.
Control hard contact points around the actuator. Uncontrolled contact becomes audible buzz.
Build at least two enclosure variants early (stiff vs compliant) so you can quantify sensitivity.
6) Noise and EMI/EMC considerations
Two problems get mixed together here: audible noise (buzz/rattle) and EMI/EMC risk.
Audible noise is mostly mechanical: loose features, enclosure coupling, and which structural resonances you excite.
EMI depends on your system and the actuator. LRAs are brushless by design, avoiding commutator arcing mechanisms that can exist in brushed ERM designs. (Precision Microdrives discusses this distinction in the AB-020 article linked earlier.)
If you have sensitive RF, analog, or sensor front ends, test early in EVT. Don’t wait for system-level compliance testing to discover you coupled into something you care about.
7) Reliability, variation, and qualification testing
For OEM teams, “works on the bench” is the baseline. Qualification is where the hidden differences show up.
A few patterns to expect:
Variation shows up differently. ERM variation often shows up as speed/current differences. LRA variation shows up as resonance shifts and amplitude consistency.
Mechanical changes from EVT to DVT matter. Housing material, gasket compression, adhesive thickness, and mounting points can all move your haptics outcome.
If your schedule is tight, choose the actuator and driver approach that gives you the best repeatability across builds, not just the best peak performance on one unit.
8) Cost and supply chain realities
If you’re consolidating an ERM vs LRA decision across teams, it helps to anchor the conversation on what’s actually procurable. For quick part shortlisting by package and termination, start from your internal catalogs for ERM vibration motors and LRA actuators, then validate the “feel” in your own mechanical stack.
ERM is still common in cost-sensitive devices because the integration path is simple and the ecosystem is commoditized.
LRA usually adds BOM and engineering time (actuator plus driver, plus tuning and validation). In return, it can buy you effect quality and consistency that’s hard to get with ERM.
If sourcing is a constraint, don’t treat “ERM vs LRA” as the only decision. Termination type (spring contacts vs FPC vs lead wires), adhesive process capability, and incoming inspection can drive schedule more than the actuator category.
Which one should you choose?
Use this as a first-pass filter:
Choose LRA if you need crisp short effects, consistent feel across battery states, and you can allocate BOM plus time for tuning.
Choose ERM if you need a simple alert buzz, you’re cost-constrained, or you’re in an early prototype where integration time is the bottleneck.
Typical use-case leaning:
Wearables: often LRA (power budget plus “tap” quality).
Medical devices: depends on the alarm requirement and qualification evidence you need.
Consumer electronics: LRA for premium UX, ERM for basic notifications.
ERM vs LRA in phones and compact consumer devices
If you’re choosing an ERM motor vs LRA motor specifically for phones or other compact consumer electronics, you’ll usually face two practical constraints: very limited Z-height and a tight tolerance for audible buzz.
ERM vibration motor options can still be attractive when you need a simple alert pattern, broad sourcing flexibility, and minimal driver complexity.
LRA tends to win when you need a sharper “tap” feel and more repeatable effects across battery states—but it’s more sensitive to mechanical stack-up and often needs tracking or calibration.
For a phone-focused application discussion and selection context, see INEED’s ERM and LRA applied to cell phones.
Common engineering mistakes
Assuming datasheet feel equals in-product feel
Fix: prototype at least two mounting/coupling variants and measure in the final stack.
Driving an LRA open-loop and expecting consistent results
Fix: use a driver with resonance tracking or a calibration workflow and braking support.
Skipping multi-sample checks
Fix: test multiple units early. Resonant systems punish optimism.
Treating haptics as “just firmware”
Fix: haptics is electro-mechanical. Put EE and ME on the same validation plan.
Video: quick visual refresher
Next steps
If you already know your form factor and mounting constraints, shortlist candidate parts and validate in your enclosure.
Start with:
Explore INEED’s ERM vibration motor product range if you want the broadest sourcing flexibility for an ERM motor.
If you’re building thin wearables, browse the coin ERM vibration motor category for common package sizes and termination options.
For crisp effects, shortlist options from the LRA linear resonant actuator category and plan early for tuning and mounting validation.
If you want a faster path through sampling and early validation, INEED Electronics can support actuator selection, termination choices (FPC/contacts/wires/connectors), and a prototype plan aligned to EVT/DVT.
FAQ
1) Can I drive an LRA like an ERM motor with simple PWM?
You can make an LRA move with a simple drive, but performance usually won’t be stable. An LRA is a resonant system, so the best output happens near its resonant frequency. If you drive it open-loop, small shifts from mounting or temperature can change feel and efficiency. For product programs that care about repeatable haptics, plan for resonance tracking or a calibration workflow.
2) Why does my ERM vibration motor sound “buzzy” or rattle in the enclosure?
In most cases, the noise isn’t the ERM motor itself—it’s the mechanical stack. Loose contact points, flexible mounting, or an enclosure mode that gets excited by the motor can turn vibration into audible buzz. The fix is usually mechanical: stiffen the mount, control contact points, and validate across multiple enclosure builds.
3) ERM vs LRA: which is easier to qualify for mass production?
It depends on what “easy” means for your program. ERM parts are often simpler to drive and more tolerant electrically, but enclosure variation can still change perceived feel. LRA programs can be more repeatable in effect quality when you have a stable mechanical stack and a driver approach that manages resonance—but they require more upfront tuning and validation work.